Unstable, But in a Good Way
by Alan S. Brown
How Katia Bertoldi investigates unstable structures

The Author
As a child growing up in Italy, Katia Bertoldi loved to build with Legos. Today, she is still playing with structures, but in ways neither she nor anyone else could have imagined.
This is because Bertoldi, a member of Harvard University’s Kavli Institute of Bionano Science and Technology and a professor of applied mechanics, investigates unstable structures.
While others do the same, their aim is to boost stability and prevent failures. Bertoldi, on the other hand, exalts in instability—the type that leads to failures.
“When we design bridges and buildings, we want to avoid unstable behaviors because they typically correspond to the collapse of the structure,” she explained. “But I was curious about whether we could harness these behaviors.”
Her investigations are a long way from her initial career as a structural engineer in Italy.
“I come from a small town where all the buildings are the same,” she said. “After a while, it becomes pretty simple. You just calculate the dimensions for the columns and the beams. There was no space for imagination, and I got frustrated.”
She returned to school for a Ph.D. in structural theory and modeling, then headed to MIT for post-doctoral research. There, she met a visiting scholar who showed her a fluid filter he was working with. It was a square grid of holes punched into a slab of rubber.
“A simple structure, but when he compressed it with his hand, something peculiar happened,” she said. “We would have expected all the holes to align with direction of the compressive force. Instead, one hole stretched horizontally and the next stretched vertically and so on.
“I was really surprised that no one had noticed this behavior before. Engineers had always focused on the collapse rather than how the rubber deformed under load. That was the turning point for me. I wanted to learn how we could use this behavior.”
As she looked, Bertoldi began observing unexpected behaviors in other simple structures. She found, for example, a material with an unusual quality: a negative Poisson’s ratio (the ratio of how much a body’s width and length changes when pulled lengthwise). Most materials, like chewing gum or garment price barbs, get thinner when stretched. This material grew fatter.
She also found she could use it as a filter: “It would let waves with certain frequencies pass, but when we deformed it, it stopped them. We could turn it on or off by controlling how much we deformed it.”
She moved onto manipulating simple tubes. Ordinarily, inflating a tube would cause it to swell in all directions. By wrapping it with reinforcing fibers, she could get it to bend like a finger when she inflated it.
Bartoldi also developed a simple way to make soft robots crawl. Despite their name, soft robotics often contain hard electronic controls as well as metal pumps and valves to control movement.
Bertoldi eliminates all that. Instead, she uses a principle called viscous flow that is familiar to anyone who has ever used a straw. It’s easy to drink through a thick straw, but switch to a thinner straw and it takes a lot of suction—or pressure—to make the liquid move.
Bertoldi’s team used that principle to build robots with a combination of thick and thin air lines that generated pressure like a small straw to push the robot forward. She needed only a single air input and no electronics, since the pressure within the system controlled the order of when different segments inflated.
Bertoldi has also put origami and its cousin, kirigami (which uses cuts as well as folds) to work. One example is a tubular structure with a series of cuts on the bottom. When the tube stretches, the edges of the surface open to grip the ground like a real snakeskin so it can pull itself forward.

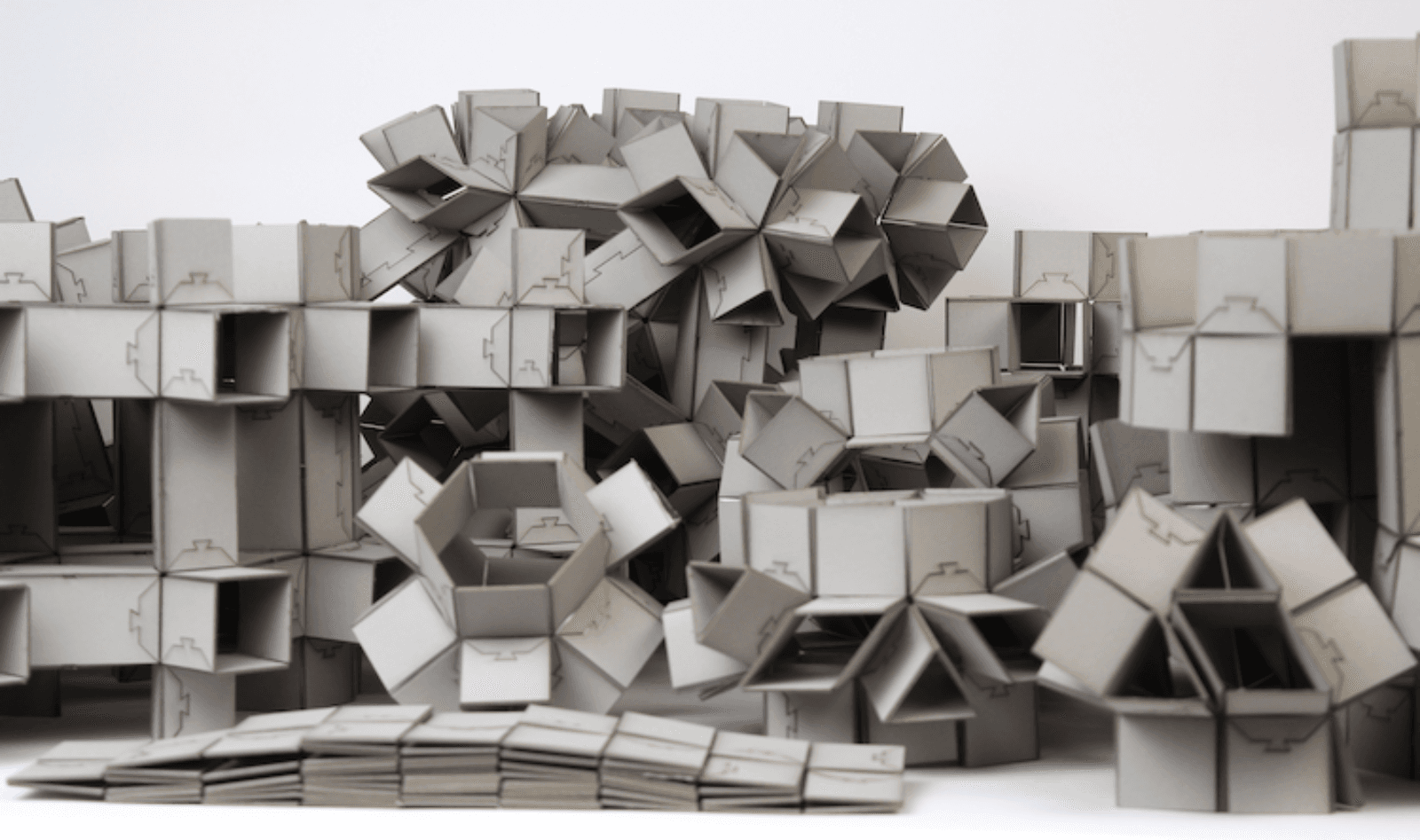
Another project involved a toolkit of folded objects that can move between one geometry and another. Watching them transform is mesmerizing, like looking through a kaleidoscope. She believes engineers may one day use similar structures to change the geometry of certain materials used to manipulate light and sound.
Yet the most surprising thing about Bertoldi’s work is the simplicity of the structures she works with. They look almost like the toys she played with as a child, but they could have a profound effect on how we build in the future.